基于无人机倾斜摄影的三维全景模型构建对比分析
王金虎
通过三维全景模型构建的对比来验证不同机型以及软件的优缺点,以南京信息工程大学和东南大学成贤学院作为研究区域,基于无人机倾斜摄影技术,选取PHANTOM4RTK和MAVIC2Pro进行飞行作业。对几款常见的建模软件进行对比分析后选取context capture和Dji Terra处理遥感影像进行三维建模。进行实景三维建模的对比分析后达到了预期的效果,得出不同机型、软件、飞行高度各自的优缺点。
利用无人机和倾斜的摄影及测量等技术实时获取实时影像,可以同时提高三维模型设计的图象真实度、精度以及三维建模计算效率,具有设计作业安全高效、成本低省等方面众多明显优势。倾斜摄影可以有效提升模型的生产效率,缩短作业完成时间,把无人机原本承担大量重复性的外业工作任务转变为内业工作,降低操作者外业劳动强度。通过三维全景模型构建的对比来验证不同机型以及软件的优缺点,可以在以后的任务中选择适合的机型、软件、飞行高度来减少任务量,节省成本,具有相当的现实意义。
论文信息:
王金虎,许俊辉,史嘉奇,王宇豪.基于无人机倾斜摄影的三维全景模型构建对比分析.《建模与仿真》2022年第6期1434-1444 DOI:10.12677/MOS.2022.116135
表1 参数对比
| 中位投影误差[像素] | 最小重投影误差RMS[像素] | 最大重投影误差RMS[像素] | 最小位置不确定性[米] | 最大位置不确定性[米] |
Production2 | 0.4 | 0.01 | 1.9 | 0.0041 | 0.9394 |
Production3 | 0.96 | 0.01 | 2.98 | 0.0062 | 1.1448 |
表2 影像位置与实测坐标之间的差值
名称 | Δx | Δy | Δz | 平面 |
最小值 | 0.0024 | 0.0019 | 0.0011 | 0.0253 |
平均值 | 0.0045 | 0.0043 | 0.0032 | 0.0750 |
最大值 | 0.0123 | 0.0097 | 0.0072 | 0.5335 |
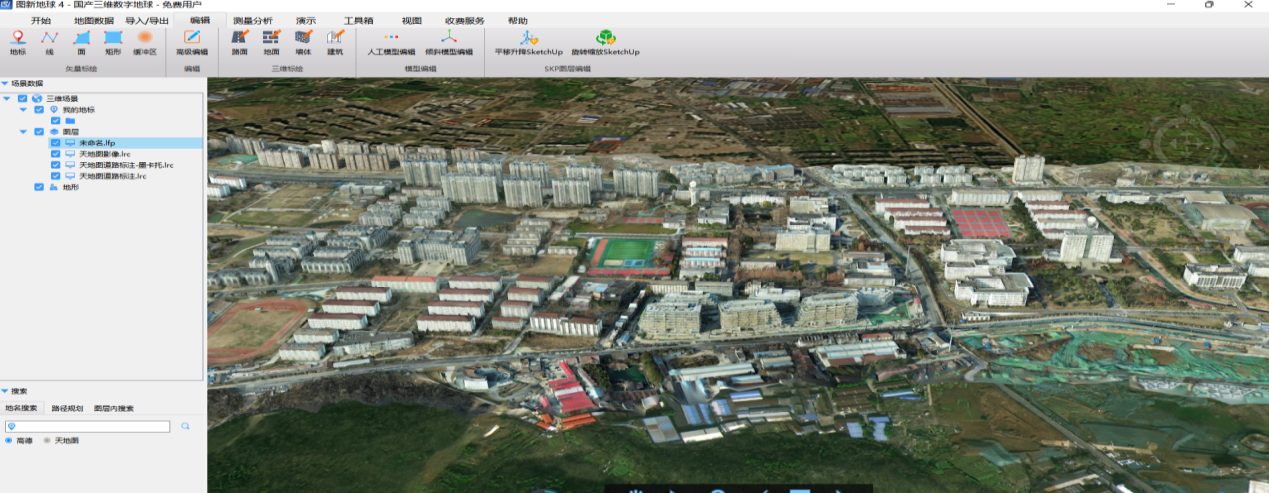
图1 DJI Terra 产出的南京信息工程大学模型

图2 东南大学成贤学院模型
